Hello iTaSC users,
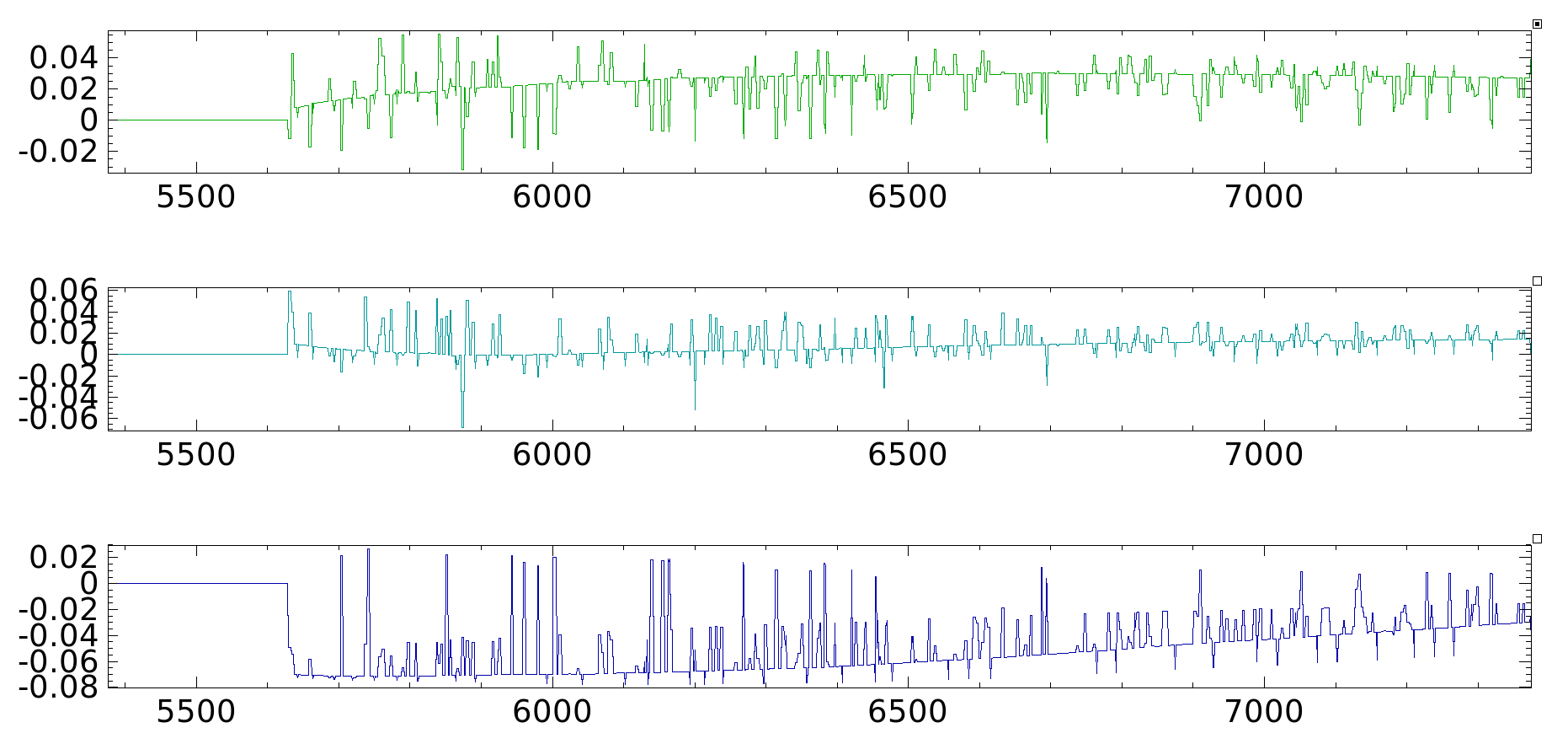
I am working with iTaSC for a couple of weeks now, I implemented a simple example where the first task is to follow a Cartesian trajectory and the second to avoid the joint limits of our robot. I am using the existing cartesian_motion and joint_limit_avoidance packages for this. It is kind of working, but the output of the WDLSPriorVelSolver is very noisy when I activate CC_Cartesian, although the input trajectory is smooth. I attached a screenshot showing the output of the Solver`s qdot - port. When I activate the joint limit avoidance alone, the output of the solver is smooth again.
Now, I also tried the Comanipulation Demo example and here it's the same: The Cartesian Motion based tasks produce noisy output, while the other tasks give smooth output.
Does anyone of you know notice the same thing? Is this behavior of CC_Cartesian "normal" or am I doing something wrong?
Btw I am using the orocos_toolchain_ros stack.
Best regards, Dennis
| Attachment | Size |
|---|---|
| Screenshot-1.png | 52.13 KB |
{kind=link}